Semestrálna práca: Sériové, paralelné a hybridné kinematické štruktúry výrobných strojov a robotov
Skryť detaily | Obľúbený- Kvalita:86,0 %
- Typ:Semestrálna práca
- Univerzita:Trenčianska univerzita Alexandra Dubčeka v Trenčíne
- Fakulta:Fakulta špeciálnej techniky
- Kategória:Technika
- Podkategória:Technológia
- Predmet:Základy robotizácie
- Študijný program:Servis a opravy automobilov
- Autor:marek599
- Ročník:3. ročník
- Rozsah A4:8 strán
- Zobrazené:1 993 x
- Stiahnuté:7 x
- Veľkosť:0,8 MB
- Formát a prípona:MS Office Word (.docx)
- Jazyk:slovenský
- ID projektu:42603
- Posledna úprava:06.01.2014
1. Kinematické štruktúry výrobných strojov a robotov
U sériových kinematických štruktúr je geometrický tvar pracovného priestoru plne určený relatívnym pohybom koncového bodu TCP (Tool Centre Point; programovaný bod nástroja) - bežne realizovaným posuvnými alebo rotačnými sériovými pohybmi v smere súradnicových osí s odpovedajúcimi priamočiarymi alebo rotačnými vedeniami k ľubovoľnému referenčnému súradnicovému systému.
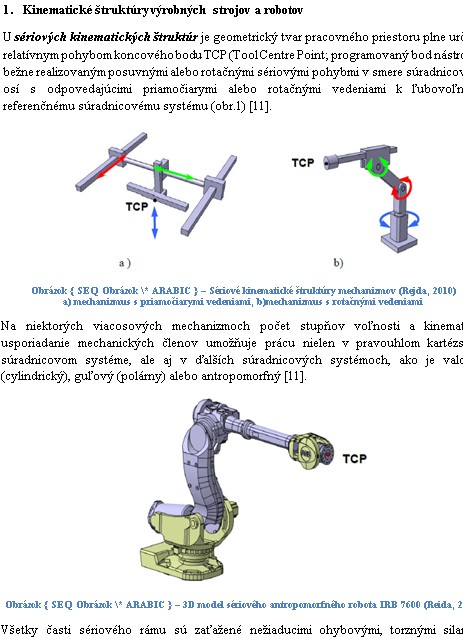
Na niektorých viacosových mechanizmoch počet stupňov voľnosti a kinematické usporiadanie mechanických členov umožňuje prácu nielen v pravouhlom kartézskom súradnicovom systéme, ale aj v ďalších súradnicových systémoch, ako je valcový (cylindrický), guľový (polárny) alebo antropomorfný.
Všetky časti sériového rámu sú zaťažené nežiaducimi ohybovými, torznými silami a momentmi, preto musia byť dostatočne efektívne konštruované, aby mali požadované predpoklady ich eliminovať.
...
U sériových kinematických štruktúr je geometrický tvar pracovného priestoru plne určený relatívnym pohybom koncového bodu TCP (Tool Centre Point; programovaný bod nástroja) - bežne realizovaným posuvnými alebo rotačnými sériovými pohybmi v smere súradnicových osí s odpovedajúcimi priamočiarymi alebo rotačnými vedeniami k ľubovoľnému referenčnému súradnicovému systému.
Na niektorých viacosových mechanizmoch počet stupňov voľnosti a kinematické usporiadanie mechanických členov umožňuje prácu nielen v pravouhlom kartézskom súradnicovom systéme, ale aj v ďalších súradnicových systémoch, ako je valcový (cylindrický), guľový (polárny) alebo antropomorfný.
Všetky časti sériového rámu sú zaťažené nežiaducimi ohybovými, torznými silami a momentmi, preto musia byť dostatočne efektívne konštruované, aby mali požadované predpoklady ich eliminovať.
...