Projekt: Polohový systém servopohonu TM DCS600
Skryť detaily | Obľúbený- Kvalita:88,6 %
- Typ:Projekt
- Univerzita:Slovenská technická univerzita v Bratislave
- Fakulta:Fakulta elektrotechniky a informatiky
- Kategória:Technika
- Podkategória:Automatizácia
- Predmet:Servopohony
- Autor:riverman
- Ročník:4. ročník
- Rozsah A4:21 strán
- Zobrazené:1 491 x
- Stiahnuté:0 x
- Veľkosť:0,3 MB
- Formát a prípona:PDF dokument (.pdf)
- Jazyk:slovenský
- ID projektu:38256
- Posledna úprava:19.11.2011
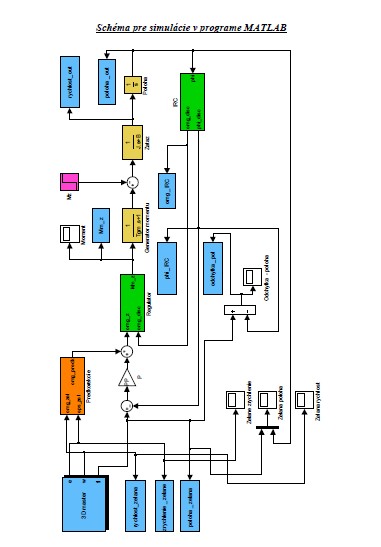
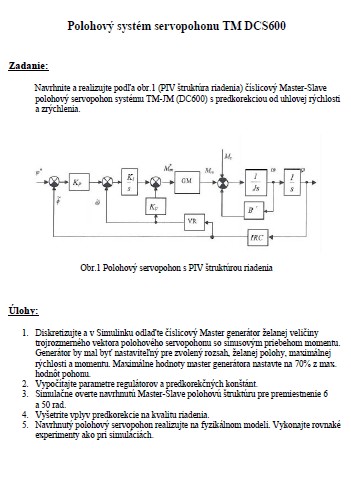
Navrhnite a realizujte podľa obr.1 (PIV štruktúra riadenia) číslicový Master-Slave polohový servopohon systému TM-JM (DC600) s predkorekciou od uhlovej rýchlosti a zrýchlenia.
1. Diskretizujte a v Simulinku odlaďte číslicový Master generátor želanej veličiny trojrozmerného vektora polohového servopohonu so sínusovým priebehom momentu. Generátor by mal byť nastaviteľný pre zvolený rozsah, želanej polohy, maximálnej rýchlosti a momentu. Maximálne hodnoty master generátora nastavte na 70% z max. hodnôt pohonu.
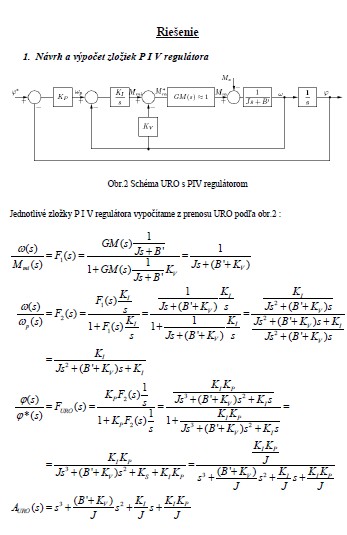
2. Vypočítajte parametre regulátorov a predkorekčných konštánt.
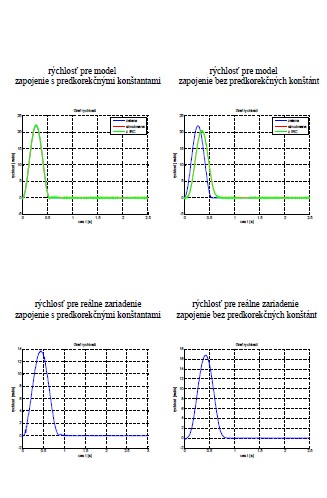
3. Simulačne overte navrhnutú Master-Slave polohovú štruktúru pre premiestnenie 6 a 50 rad.
4. Vyšetrite vplyv predkorekcie na kvalitu riadenia.
5. Navrhnutý polohový servopohon realizujte na fyzikálnom modeli. Vykonajte rovnaké experimenty ako pri simuláciách.
1. Diskretizujte a v Simulinku odlaďte číslicový Master generátor želanej veličiny trojrozmerného vektora polohového servopohonu so sínusovým priebehom momentu. Generátor by mal byť nastaviteľný pre zvolený rozsah, želanej polohy, maximálnej rýchlosti a momentu. Maximálne hodnoty master generátora nastavte na 70% z max. hodnôt pohonu.
2. Vypočítajte parametre regulátorov a predkorekčných konštánt.
3. Simulačne overte navrhnutú Master-Slave polohovú štruktúru pre premiestnenie 6 a 50 rad.
4. Vyšetrite vplyv predkorekcie na kvalitu riadenia.
5. Navrhnutý polohový servopohon realizujte na fyzikálnom modeli. Vykonajte rovnaké experimenty ako pri simuláciách.