Semestrálna práca: Porovnanie metód riadenia stability robota Nao stojaceho na dvoch nohách s využitím tlakových senzorov (FSR)
Skryť detaily | Obľúbený- Kvalita:92,3 %
- Typ:Semestrálna práca
- Univerzita:Technická univerzita v Košiciach
- Fakulta:Fakulta elektrotechniky a informatiky
- Kategória:Technika
- Podkategória:Umelá inteligencia
- Predmet:Biokybernetika a evolučná robotika
- Študijný program:Umelá inteligencia
- Autor:swanqa
- Ročník:4. ročník
- Rozsah A4:29 strán
- Zobrazené:1 109 x
- Stiahnuté:0 x
- Veľkosť:0,6 MB
- Formát a prípona:Archív súborov (.zip)
- Jazyk:slovenský
- ID projektu:42418
- Posledna úprava:31.08.2013
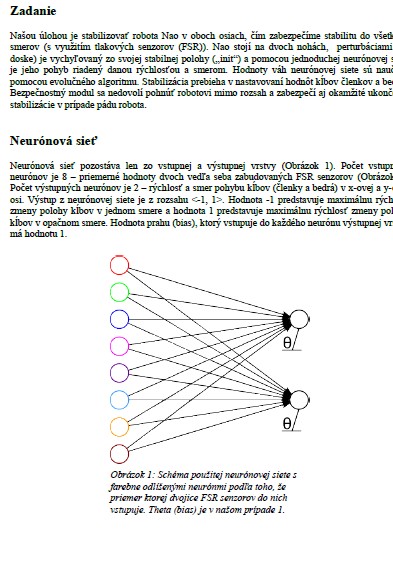
Úlohou je porovnať metódy riadenia stability robota Nao stojacého na dvoch nohách s použitím dát z jeho tlakových senzorov na spodných častiach chodidiel. Prioritou je použiť metódu neurónovej siete, ktorej váhy sa učia evolučným algoritmom - stabilizovať robota Nao v oboch osiach, čím zabezpečíme stabilitu do všetkých smerov (s využitím tlakových senzorov (FSR)). Nao stojí na dvoch nohách, perturbáciami (na doske) je vychyľovaný zo svojej stabilnej polohy („init“) a pomocou jednoduchej neurónovej siete je jeho pohyb riadený danou rýchlosťou a smerom. Stabilizácia prebieha v nastavovaní hodnôt kĺbov členkov a bedier. Bezpečnostný modul sa nedovolí pohnúť robotovi mimo rozsah a zabezpečí aj okamžité ukončenie stabilizácie v prípade pádu robota. Projekt obsahuje správu a systémovú príručku.